
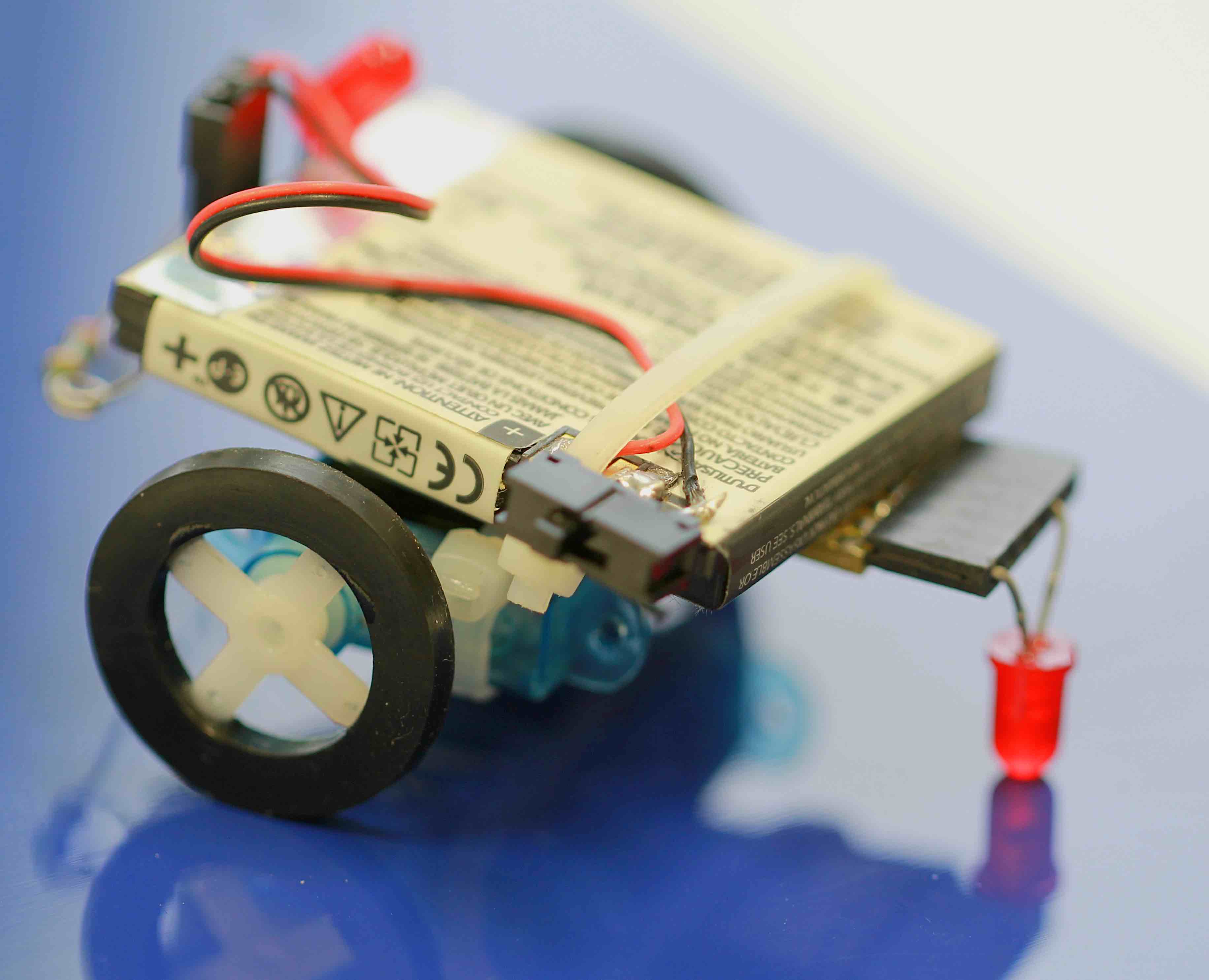
SimpleBot is a super-simplified version of the Wombat robot that we used in the Gold Coast TechSpace Discovery Workshops program.
In this version we don’t use the MiniMoto as we only have modified servos which can be driven directly by the low current outputs of the Gcduino. We also use an old mobile phone battery as a power source and the wheels are also recycled.
The bump sensor is merely a resistor bent over and the LED can be used to signal a bump but also nicely doubles as a stabilizer!
Modified servo means the end stops have been removed and the position potentiometer disengaged.
- Pin 5 – Servo 1 (middle control line of servo wires)
- Pin 6 – Servo 2 (middle control line of servo wires)
- Pin 10 – Piezo (option – not fitted as servo noise can mask the piezo sound!)
- Pin 11 – Bump Sensor (Connects to 0Volt when bumped)
- Pin 13 – Bumped Led via 220 ohm resistor to ground
Here is the code: ServoMotors_with_Bump_Speaker